|
|

|

|
| e-Pub |
Section: New Results
3D object and scene modeling, analysis, and retrieval
Learning joint reconstruction of hands and manipulated objects
Participants : Yana Hasson, Gül Varol, Dimitrios Tzionas, Igor Kalevatykh, Michael Black, Ivan Laptev, Cordelia Schmid.
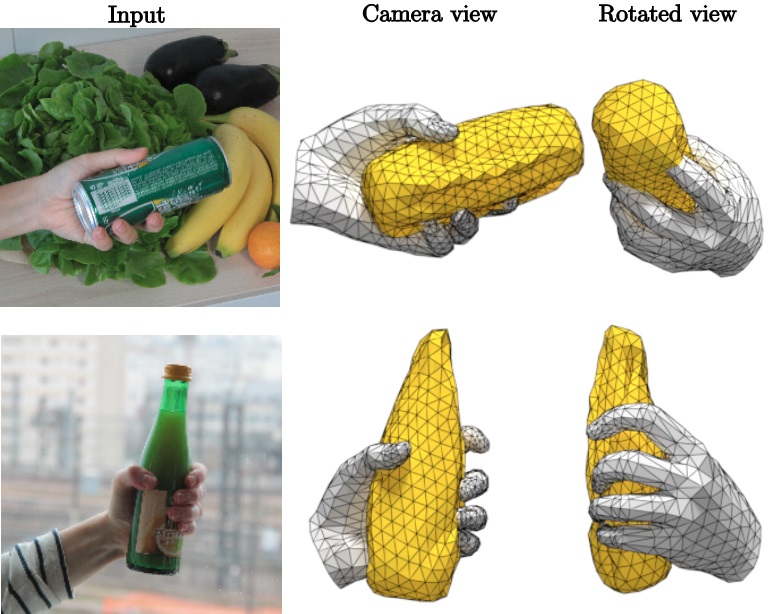
Estimating hand-object manipulations is essential for interpreting and imitating human actions. Previous work has made significant progress towards reconstruction of hand poses and object shapes in isolation. Yet, reconstructing hands and objects during manipulation is a more challenging task due to significant occlusions of both the hand and object. While presenting challenges, manipulations may also simplify the problem since the physics of contact restricts the space of valid hand-object configurations. For example, during manipulation, the hand and object should be in contact but not interpenetrate. In [14] we regularize the joint reconstruction of hands and objects with manipulation constraints. We present an end-to-end learnable model that exploits a novel contact loss that favors physically plausible hand-object constellations. Our approach improves grasp quality metrics over baselines, using RGB images as input. To train and evaluate the model, we also propose a new large-scale synthetic dataset, ObMan, with hand-object manipulations. We demonstrate the transferability of ObMan-trained models to real data. Figure 1 presents some example results.
|
D2-Net: A Trainable CNN for Joint Detection and Description of Local Features
Participants : Mihai Dusmanu, Ignacio Rocco, Tomas Pajdla, Marc Pollefeys, Josef Sivic, Akihiko Torii, Torsten Sattler.
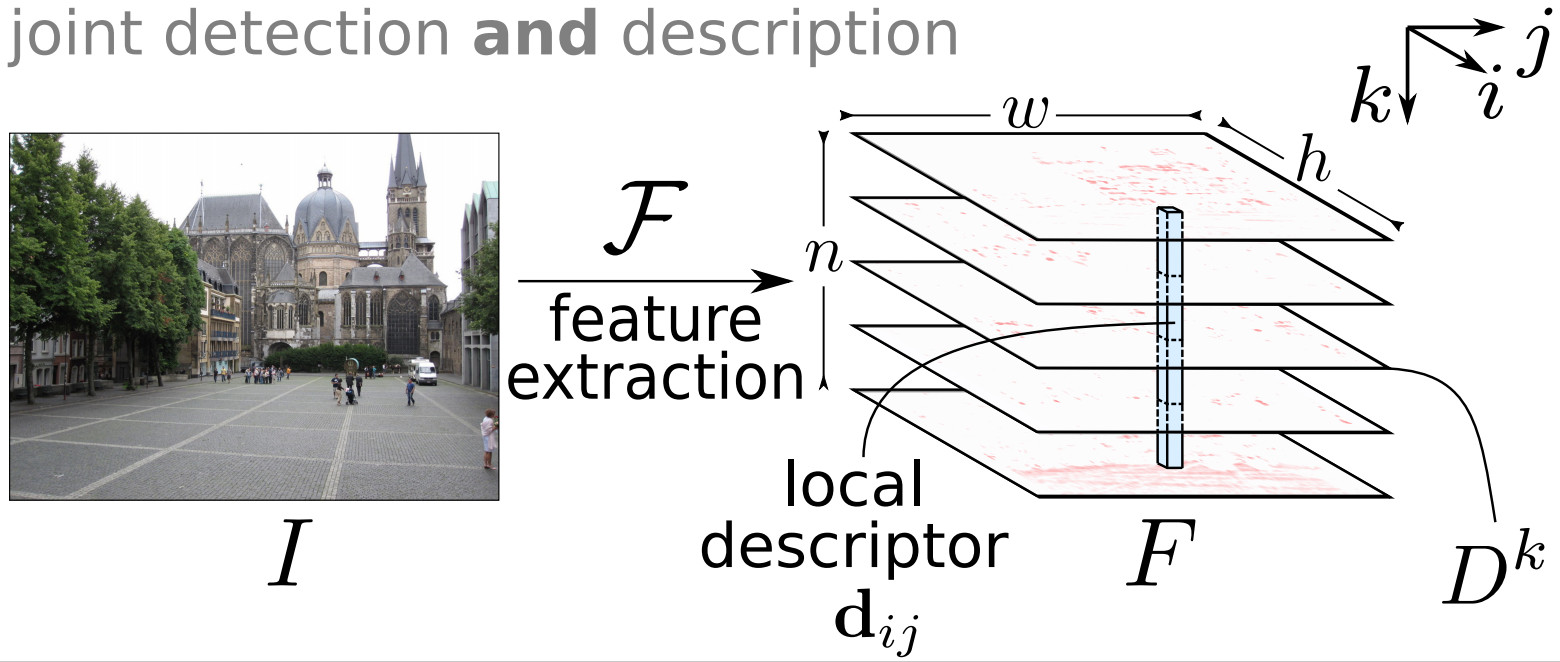
In [13], we address the problem of finding reliable pixel-level correspondences under difficult imaging conditions. We propose an approach where a single convolutional neural network plays a dual role: It is simultaneously a dense feature descriptor and a feature detector, as illustrated in Figure 2. By postponing the detection to a later stage, the obtained keypoints are more stable than their traditional counterparts based on early detection of low-level structures. We show that this model can be trained using pixel correspondences extracted from readily available large-scale SfM reconstructions, without any further annotations. The proposed method obtains state-of-the-art performance on both the difficult Aachen Day-Night localization dataset and the InLoc indoor localization benchmark, as well as competitive performance on other benchmarks for image matching and 3D reconstruction.
|
Is This The Right Place? Geometric-Semantic Pose Verification for Indoor Visual Localization
Participants : Hajime Taira, Ignacio Rocco, Jiri Sedlar, Masatoshi Okutomi, Josef Sivic, Tomas Pajdla, Torsten Sattler, Akihiko Torii.
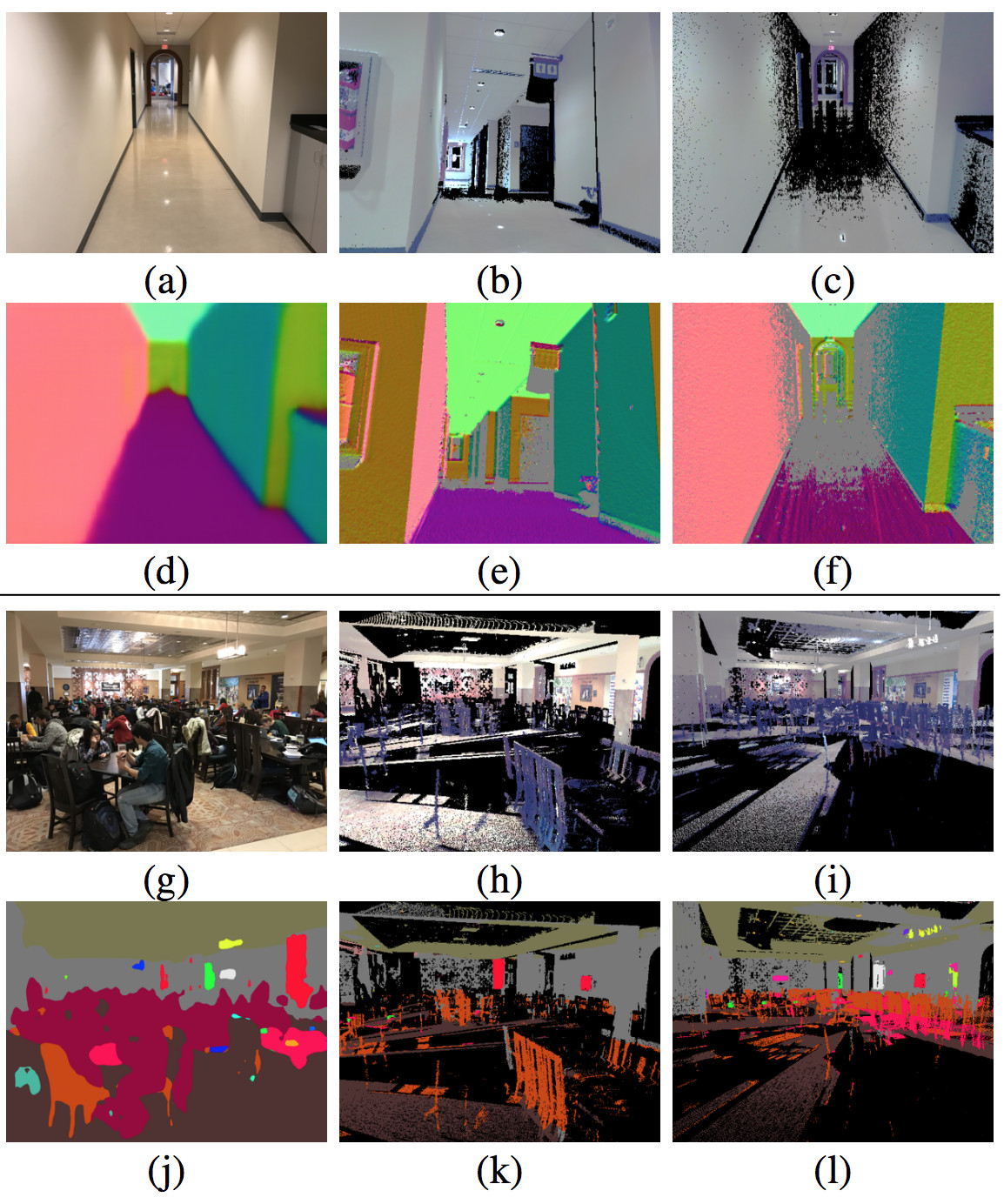
Visual localization in large and complex indoor scenes, dominated by weakly textured rooms and repeating geometric patterns, is a challenging problem with high practical relevance for applications such as Augmented Reality and robotics. To handle the ambiguities arising in this scenario, a common strategy is, first, to generate multiple estimates for the camera pose from which a given query image was taken. The pose with the largest geometric consistency with the query image, e.g., in the form of an inlier count, is then selected in a second stage. While a significant amount of research has concentrated on the first stage, there is considerably less work on the second stage. In [21], we thus focus on pose verification. We show that combining different modalities, namely appearance, geometry, and semantics, considerably boosts pose verification and consequently pose accuracy, as illustrated in Figure 3. We develop multiple hand-crafted as well as a trainable approach to join into the geometric-semantic verification and show significant improvements over state-of-the-art on a very challenging indoor dataset.
|
An Efficient Solution to the Homography-Based Relative Pose Problem With a Common Reference Direction
Participants : Yaqing Ding, Jian Yang, Jean Ponce, Hui Kong.
In [12], we propose a novel approach to two-view minimal-case relative pose problems based on homography with a common reference direction. We explore the rank-1 constraint on the difference between the Euclidean homography matrix and the corresponding rotation, and propose an efficient two-step solution for solving both the calibrated and partially calibrated (unknown focal length) problems. We derive new 3.5-point, 3.5-point, 4-point solvers for two cameras such that the two focal lengths are unknown but equal, one of them is unknown, and both are unknown and possibly different, respectively. We present detailed analyses and comparisons with existing 6-and 7-point solvers, including results with smart phone images.
Coordinate-Free Carlsson-Weinshall Duality and Relative Multi-ViewGeometry
Participants : Matthew Trager, Martial Hebert, Jean Ponce.
In [23], we present a coordinate-free description of Carlsson-Weinshall duality between scene points and camera pinholes and use it to derive a new characterization of primal/dual multi-view geometry. In the case of three views, a particular set of reduced trilinearities provide a novel parameterization of camera geometry that, unlike existing ones, is subject only to very simple internal constraints. These trilinearities lead to new “quasi-linear” algorithms for primal and dual structure from motion. We include some preliminary experiments with real and synthetic data.
Build your own hybrid thermal/EO camera for autonomous vehicle
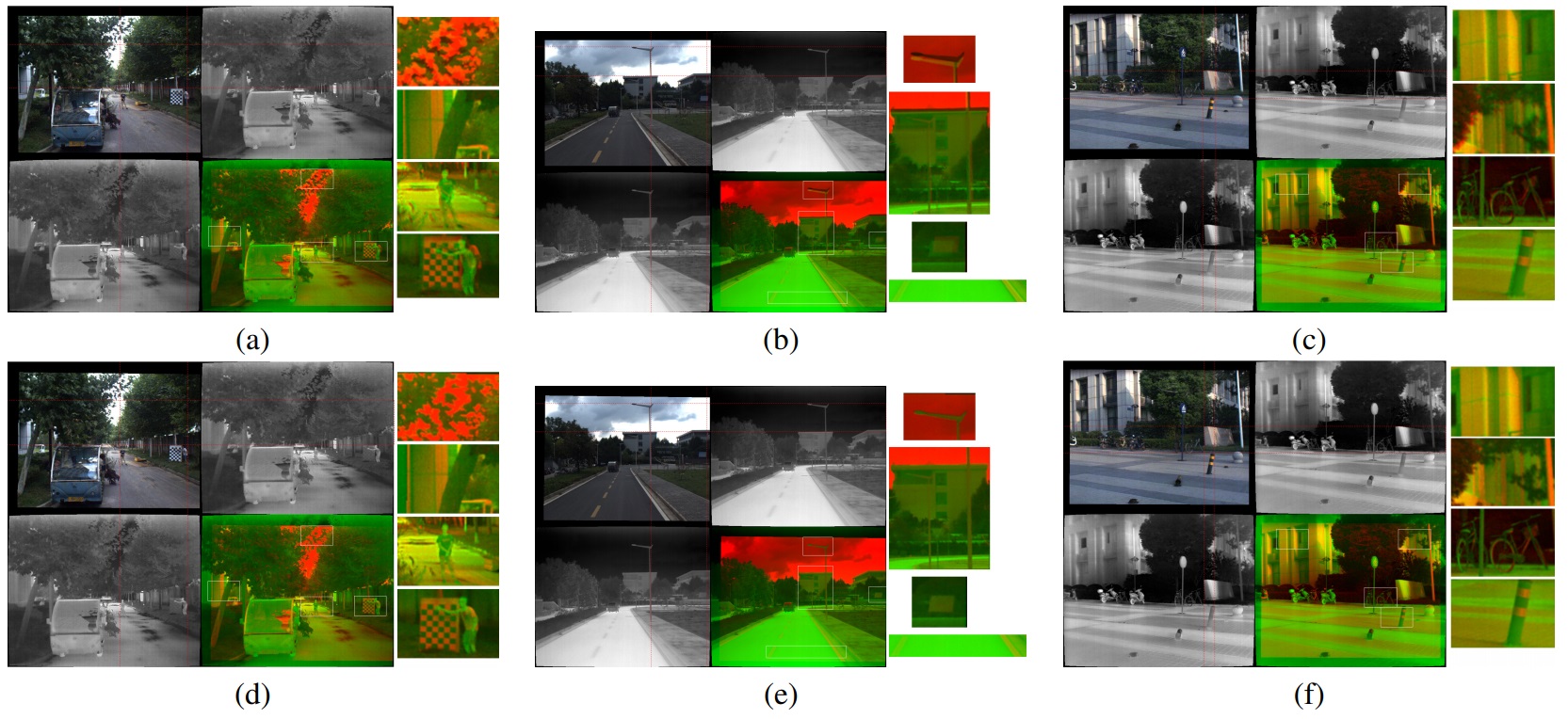
Participants : Yigong Zhang, Yicheng Gao, Shuo Gu, Yubin Guo, Minghao Liu, Zezhou Sun, Zhixing Hou, Hang Yang, Ying Wang, Jian Yang, Jean Ponce, Hui Kong.
In [24], we propose a novel paradigm to design a hybrid thermal/EO (Electro-Optical or visible-light) camera, whose thermal and RGB frames are pixel-wisely aligned and temporally synchronized. Compared with the existing schemes, we innovate in three ways in order to make it more compact in dimension, and thus more practical and extendable for real-world applications. The first is a redesign of the structure layout of the thermal and EO cameras. The second is on obtaining a pixel-wise spatial registration of the thermal and RGB frames by a coarse mechanical adjustment and a fine alignment through a constant homography warping. The third innovation is on extending one single hybrid camera to a hybrid camera array, through which we can obtain wide-view spatially aligned thermal, RGB and disparity images simultaneously. The experimental results show that the average error of spatial-alignment of two image modalities can be less than one pixel. Some results of our method are illustrated in Figure 4.
|